
I am currently leading the robotics team as staff engineer and tech manager in Alibaba, in charging of Alibaba's exploration in Embodied AI, covering the entire chain of Data-Model-Hardware-Applications, and integrating the capabilities of Qwen LLM with robots.
Prior to this, I completed a six-year advanced program at Harbin Institute of Technology, culminating in a Master of Robotics Engineering awarded by State Key Laboratory of Robotics and System in 2016.
During my college life, I successfully attained the following achievements:
During my Alibaba tenure, I successfully delivered these core projects:
I have also published 10+ high-quality papers in top robotics conferences, ICRA, IROS and TRO,etc
My research is focusing on robotics, specifically, perception, planning and manipulation etc.
Feel free to contact me if you are interested in amazing robotics positions in Alibaba.
Github: https://github.com/hitcm
E-mail: robotsming@gmail.com
Google Scholar: G+
 | Closing the Loop: Real-Time Visual-Language-Action Control for Mobile Dual-Arm Systems Mingming Zhang, etc 2025 |
 | Mobile manipulation Couples Base and Arm Motion, Boosting Productivity Through Unified Motion Control. Mingming Zhang, etc 2024 |
 | Franka Omni-Manipulation System: Autonomous Goods-Packing, Door-Opening, Elevator-Riding and Knob-Actuation. Mingming Zhang, etc 2024 |
 | 3D Terrain-Adaptive Locomotion and Navigation for Quadruped Robots. Mingming Zhang, etc 2023 |
 | XiaoManLv Surpasses 1,000 Autonomous Delivery Units in Global Deployment Milestone Mingming Zhang, etc 2023 [ news, news2] |
 | 3D Reconstruction for Static Scene and Dynamic Objects With Online Images. Mingming Zhang, etc 2022 [ video] |
 | All-weather and All-terrain Robotic Applications. Mingming Zhang 2022 [ video] |
 | High Precision Repeatability for Robotic Localization and Planning. Mingming Zhang 2021 [ video] |
 | LIDAR Based Multi Object Tracking. Mingming Zhang 2021 [ video] |
 | LIDAR Odometry, Mapping and Relocalization in Pre-built Map Mingming Zhang 2020 [ video] |
 | Multi Agent Visual Inertial Mapping Mingming Zhang 2020 [ video] |
 | Kinematics Based Visual Localization for Skid-Steering Robots: Algorithm and Theory Xingxing Zuo, Mingming Zhang, Yiming Chen, Guoquan Huang, Yong Liu, Mingyang Li Preprint in arXiv [ pdf ] |
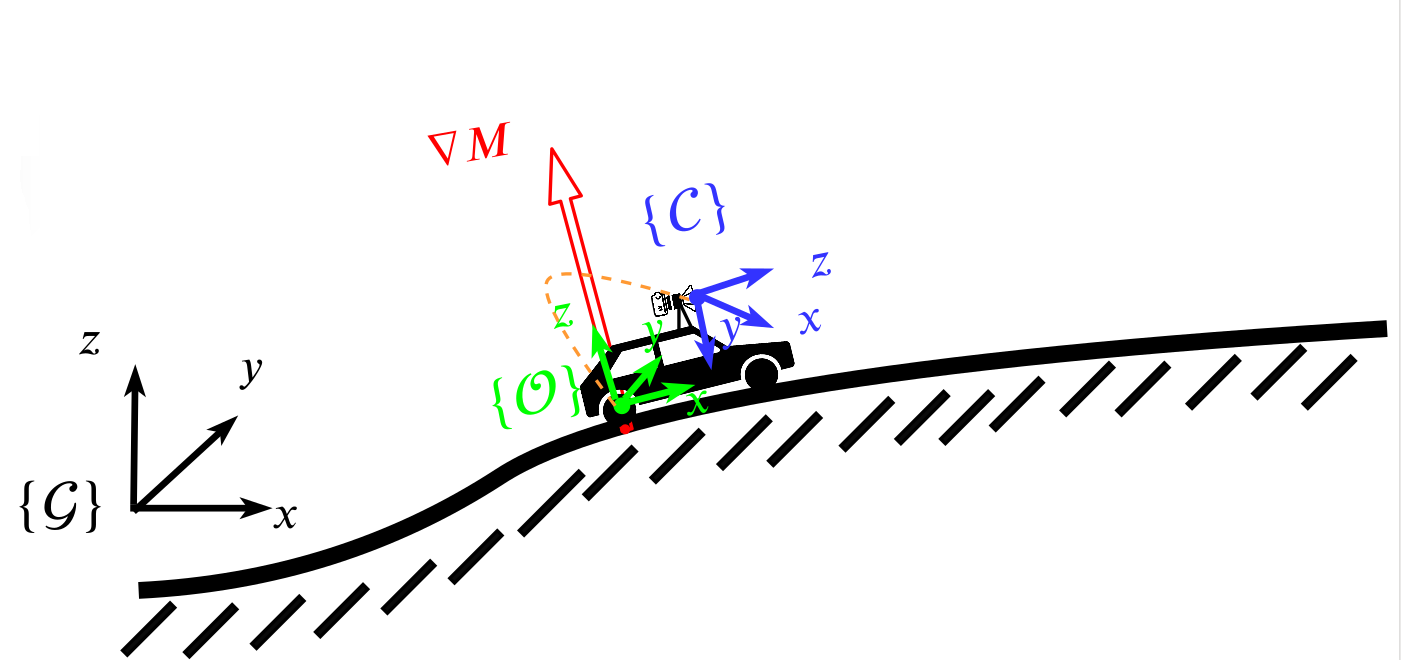 | Localization for Ground Robots: On Manifold Representation, Integration, Re-Parameterization, and Optimization Mingming Zhang, Xingxing Zuo, Yiming Chen and Mingyang Li Preprint in arXiv [ pdf, video] |
 | Monocular Visual-inertial Odometry for Different Mobile Platforms. Mingming Zhang 2018 [ video] |
 | Real-time Pose and Depth Estimation on Mobile Devices Mingming Zhang 2020 [ video] |
 | Real-time Pose and Depth Estimation on Mobile Devices Mingming Zhang 2020 [ video] |
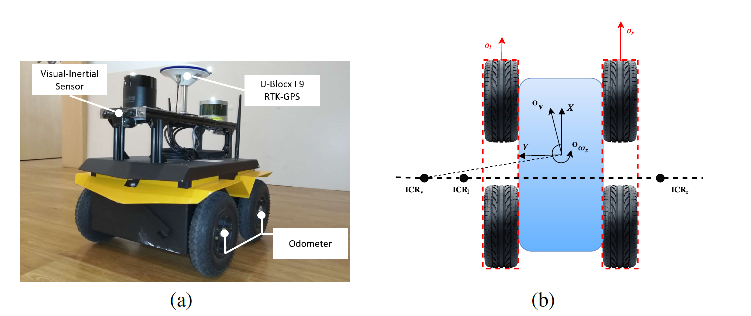 | Visual-Inertial Localization for Skid-Steering Robots with Kinematic Constraints Xingxing Zuo, Mingming Zhang, Yiming Chen, Yong liu, Guoquan Huang, and Mingyang Li ISRR 2019 [ pdf ] |
 | Perception System Design for Low-Cost Commercial Ground Robots: Sensor Configurations, Calibration, Localization and Mapping Yiming Chen, Mingming Zhang, Dongsheng Hong, Chengcheng Deng, and Mingyang Li IROS 2019 [ pdf] |
 | Vision-Aided Localization For Ground Robots Mingming Zhang, Yiming Chen and Mingyang Li IROS 2019 [ pdf, video] |
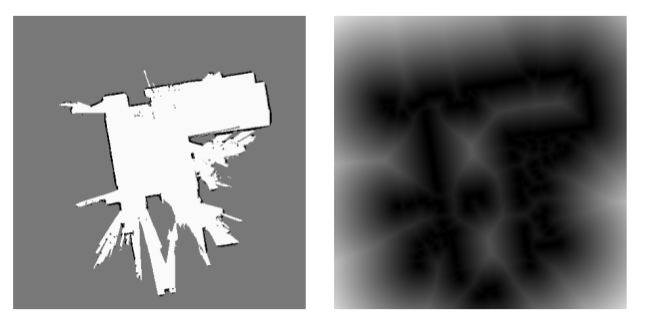 | SDF-Loc: Signed Distance Field based 2D Relocalization and Map Update in Dynamic Environments Mingming Zhang, Yiming Chen and Mingyang Li ACC 2019 [ pdf, video] |
 | Visual Inertial Map Alignment and Bundle Adjustment Mingming Zhang 2019 [ video] |
 | Real-time Stereo Direct Sparse Odometry Without Loop closure Mingming Zhang 2017 [ video] |
 | Mobile Phone AR Recognition and Tracking Mingming Zhang 2017 [ video] |